
- Focus and Scope
- Section Policies
- Peer Review Process
- Publication Frequency
- Open Access Policy
- Publications Ethics
- Allegations of Misconduct
- Withdrawn of Manuscript
- Plagiarism Policy
- References Policy
- Generative AI Policy
- Complaints Policy
- Advertising Policy
- Retraction Policy
- Ethical Guidance
Focus and Scope
The International Journal of Robotics and Control Systems (IJRCS) aims to be at the forefront of extensive and authentic research publications in robotics and control systems engineering, both theoretical and practice-oriented research. Published articles are original papers containing either an application, a modification, or an improvement of at least one control technique/method/algorithm/instrumentation to design/build/develop/operate autonomous robots or electrical engineering systems.
The topic of the published articles must belong to at least one of the following scopes:
Robotics. Since robotics integrates various fields in engineering, topics in this scope are also widely varied. Several trending topics in this category are autonomous robots, intelligent systems, robotic sensing (touch, vision), robot manipulation, robot navigation (trajectory mapping, formation, coordination), robot communication, and robot motion (dynamics, kinematics, motion improvement). Furthermore, due to the broad implementation of robotics in human life, papers with topics related to bio-inspired robots and medical robots also belong to this scope.
Control systems engineering. Generally, control system engineering aims to solve three major issues: understanding physical systems using empirical modeling in terms of their inputs, outputs and various components with different behaviors; utilizing control system design tools to design controllers for those systems; and implementing controllers in physical systems employing available technology. Thus, topics that belong to this scope are diverse. Several topics related to the first issue in control system engineering include system modeling, system identification, and control instrumentation (sensors, observers, estimation, filtering control). Meanwhile, other trending topics related to the second and third issues include automation control, linear control (state-feedback), nonlinear control (PID, feedback linearization, Sliding Mode Control), stabilization control, chaotic control system, a power control (grid control, distributed control), and system optimization (adaptive control, intelligent control).
Electrical and electronic engineering.
Aerospace engineering.
Section Policies
Peer Review Process
(http://publicationethics.org/files/u7140/Peer%20review%20guidelines.pdf)
If IJRCS's Editor has invited you to review a manuscript, please consider the following items:
- Reviewing manuscript critically but constructively and preparing detailed comments about the manuscript to help authors improve their research;
- Reviewing multiple versions of a manuscript as necessary;
- Providing all required information within established deadlines;
- Making recommendations to the editor regarding the suitability of the manuscript for publication in the journal;
- Declaring to the editor any potential conflicts of interest concerning the authors or the content of a manuscript they are asked to review;
- Reporting possible research misconducts;
- Suggesting alternative reviewers in case they cannot review the manuscript for any reasons;
- Treating the manuscript as a confidential document;
- Not making any use of the work described in the manuscript;
- Not communicating directly with authors if somehow they identify the authors;
- Not identifying themselves as authors;
- Not passing on the assigned manuscript to another reviewer;
- Ensuring that the manuscript is of high quality and original research;
- Informing the editor if he/she finds the assigned manuscript is under consideration in any other publication to his/her knowledge;
- Writing a review report in English only;
- Authoring a commentary for publication related to the reviewed manuscript.
What should be checked while reviewing a manuscript?
- Novelty;
- Originality;
- Scientific reliability;
- A valuable contribution to science;
- Adding new aspects to the existing field of study;
- Ethical aspects;
- Structure of the article submitted and its relevance to authors guidelines;
- References provided to substantiate the content;
- Grammar, punctuation, and spelling;
- Scientific misconduct.
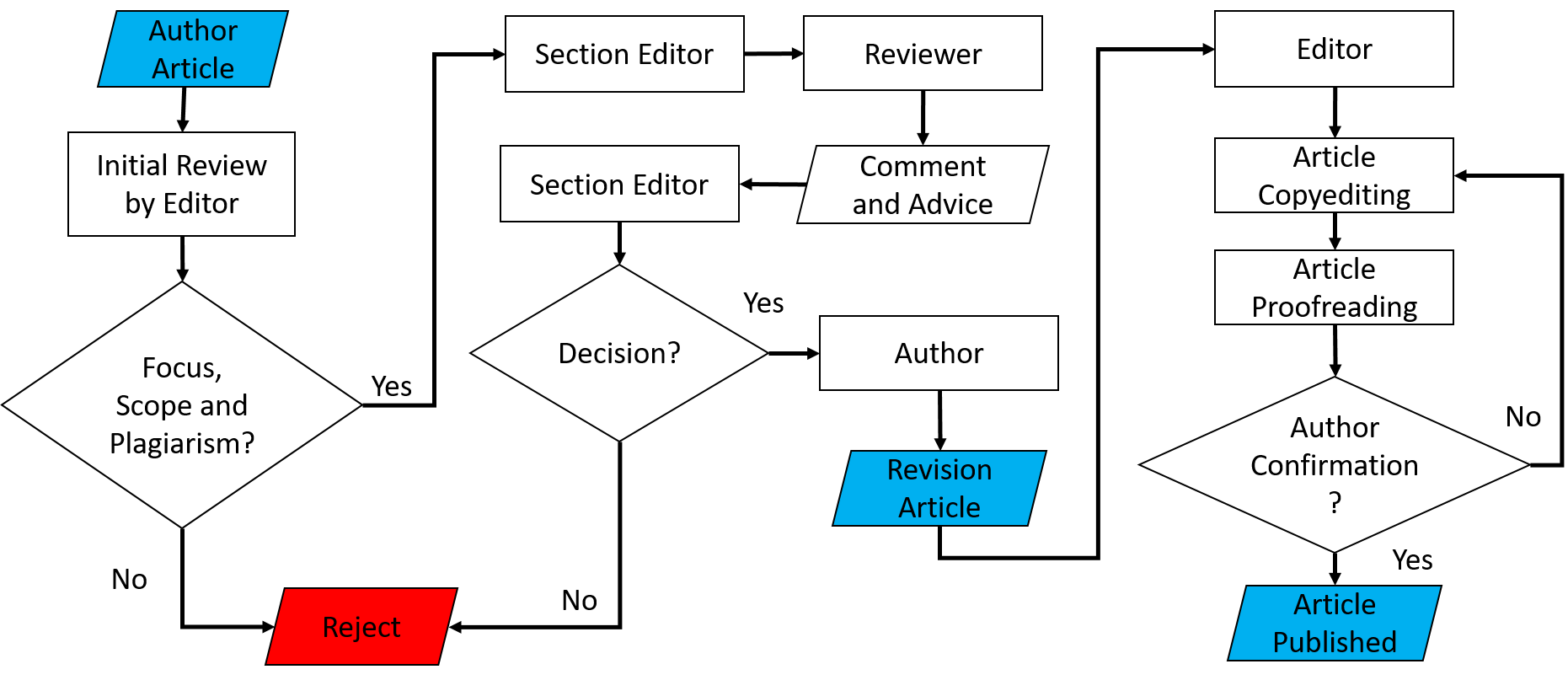
Figure 1. Peer review process
Publication Frequency
IJRCS is a rapid journal that will publish six issues a year in the period of January-February, March-April, May-June, July-August, September-October and November-December.
Open Access Policy
This journal provides immediate open access to its content on the principle that making research freely available to the public supports a greater global exchange of knowledge.
Publications Ethics
This statement clarifies the ethical behavior of all parties involved in the act of publishing an article in our journals, including the authors, the editors, the peer-reviewers, and the publisher. This statement is based on COPE’s Best Practice Guidelines for Journal Editors.
This statement clarifies the ethical behavior of all parties involved in the act of publishing an article in our journals, including the authors, the editors, the peer-reviewers, and the publisher.
- All submitted papers are subject to a strict peer-review process by Reviewers that are experts in the area of the particular paper.
- Review processes are blind peer review.
- The factors taken into account in the review are relevance, soundness, significance, originality, readability, and language.
- The possible decisions include acceptance, acceptance with revisions, or rejection.
- If authors are encouraged to revise and resubmit a submission, there is no guarantee that the revised submission will be accepted.
- Rejected articles will not be re-reviewed.
- The paper acceptance is constrained by such legal requirements as shall then be in force regarding libel, copyright infringement, and plagiarism.
- No research can be included in more than one publication.
Section B: Authors’ responsibilities
- Authors must certify that their manuscripts are their original work.
- Authors must certify that the manuscript has not previously been published elsewhere.
- Authors must certify that the manuscript is not currently being considered for publication elsewhere.
- Authors must participate in the peer-review process.
- Authors are obliged to provide retractions or corrections of mistakes.
- All Authors mentioned in the paper must have significantly contributed to the research.
- Authors must state that all data in the paper are real and authentic.
- Authors must notify the Editors of any conflicts of interest.
- Authors must identify all sources used in the creation of their manuscripts.
- Authors must report any errors they discover in their published paper to the Editors.
Section C: Reviewers’ responsibilities
- Reviewers should keep all information regarding papers confidential and treat them as privileged information.
- Reviews should be conducted objectively, with no personal criticism of the author
- Reviewers should express their views clearly with supporting arguments
- Reviewers should identify relevant published work that has not been cited by the authors.
- Reviewers should also call to the Editor in Chief’s attention any substantial similarity or overlap between the manuscript under consideration and any other published paper of which they have personal knowledge.
- Reviewers should not review manuscripts in which they have conflicts of interest resulting from competitive, collaborative, or other relationships or connections with any of the authors, companies, or institutions connected to the papers.
Section D: Editors’ responsibilities
- Editors have complete responsibility and authority to reject/accept an article.
- Editors are responsible for the contents and overall quality of the publication.
- Editors should always consider the needs of the authors and the readers when attempting to improve the publication.
- Editors should guarantee the quality of the papers and the integrity of the academic record.
- Editors should publish errata pages or make corrections when needed.
- Editors should have a clear picture of the research’s funding sources.
- Editors should base their decisions solely on the papers’ importance, originality, clarity, and relevance to the publication’s scope.
- Editors should not reverse their decisions nor overturn the ones of previous editors without serious reason.
- Editors should preserve the anonymity of reviewers.
- Editors should ensure that all research material they publish conforms to internationally accepted ethical guidelines.
- Editors should only accept a paper when reasonably certain.
- Editors should act if they suspect misconduct, whether a paper is published or unpublished, and make all reasonable attempts to persist in obtaining a resolution to the problem.
- Editors should not reject papers based on suspicions; they should have proof of misconduct.
- Editors should not allow any conflicts of interest between staff, authors, reviewers, and board members.
Allegations of Misconduct
Plagiarism
Plagiarism includes:
- Directly copying text from other sources without attribution
- Copying ideas, images, or data from other sources without attribution
- Reusing text from your own previous publications without attribution or agreement of the editor
- Exception: Reusing text from the Methods section in the author’s previous publications, with attribution to the source, is acceptable.
- Using an idea from another source with slightly modified language without attribution.
If plagiarism is detected during the peer review process, the manuscript may be rejected. If plagiarism is detected after publication, we may issue a correction or retract the paper as appropriate.
Data fabrication
This concerns the making up of research findings.
- Suspected fabricated data in a submitted manuscript
- Suspected fabricated data in a published manuscript
Data falsification
Manipulating research data with the intention of giving a false impression. This includes manipulating images (e.g., micrographs, gels, radiological images), removing outliers or “inconvenient” results, changing, adding or omitting data points, etc.
Duplicate submissions
Duplicate submission is a situation whereby an author submits the same or similar manuscripts to two different journals at the same time, either within Academic Journals or any other publisher. This includes the submission of manuscripts derived from the same data in such a manner that there are no substantial differences in the manuscripts. Duplicate submission also includes the submission of the same/similar manuscript in different languages to different journals.
Authorship Issues
Clear policies (that allow for transparency around who contributed to the work and in what capacity) should be in place for requirements for authorship and contributorship, as well as processes for managing potential disputes.
Citation Manipulation
Citation Manipulation includes excessive citations in the submitted manuscript that do not contribute to the scholarly content of the article and have been included solely for the purpose of increasing citations to a given author’s work or to articles published in a particular journal. This leads to misrepresenting the importance of the specific work and journal in which it appears and is thus a form of scientific misconduct.
Suspected Manipulation of Peer Review/Bias of Peer Reviews
International Journal of Robotics and Control Systems selects the reviewers on any manuscript with due care so as to avoid any conflict of interest between the reviewers and the authors. Our policy is compliant with COPE Guidelines on peer review.
Withdrawn of Manuscript
The author is not allowed to withdraw the submitted manuscripts because the withdrawal wastes valuable resources from editors and reviewers who spent a great deal of time processing the submitted manuscripts and work invested by the Publisher. It is unethical to withdraw a submitted manuscript from one journal if accepted by another journal. However, the authors could suggest the withdrawal if there is no updated progress review information after six months from our side.
Plagiarism Policy
The maximal plagiarism is 25%, with each source having a maximal 4%. It will immediately reject papers leading to plagiarism or self-plagiarism.
References Policy
We recommended authors use high-quality references so the paper has good and trusted knowledge. Some of the reference databases, such as
1. Elsevier Science Direct (https://www.sciencedirect.com/)
2. Springer Link (https://link.springer.com/
3. IEEE Explore (https://ieeexplore.ieee.org/Xplore/home.jsp)
4. MDPI Scilit (https://www.scilit.com/
5. Wiley Open Library (https://onlinelibrary.wiley.com/)
6. Taylor & Francis Online (https://www.tandfonline.com/)
7. Scopus (https://www.scopus.com/)
Generative AI Policy
Authors must declare the use of generative AI in scientific writing upon submission of the paper. The following guidance refers only to the writing process, and not to the use of AI tools to analyse and draw insights from data as part of the research process:
1. Generative AI and AI-assisted technologies should only be used in the writing process to improve the readability and language of the manuscript.
2. The technology must be applied with human oversight and control and authors should carefully review and edit the result, as AI can generate authoritative-sounding output that can be incorrect, incomplete or biased. Authors are ultimately responsible and accountable for the contents of the work.
3. Authors must not list or cite AI and AI-assisted technologies as an author or co-author on the manuscript since authorship implies responsibilities and tasks that can only be attributed to and performed by humans.
The use of generative AI and AI-assisted technologies in scientific writing must be declared by adding a statement at the end of the manuscript when the paper is first submitted. The statement will appear in the published work and should be placed in a new section before the references list. An example:
1. Title of new section: Declaration of generative AI and AI-assisted technologies in the writing process.
2. Statement: During the preparation of this work the author(s) used [NAME TOOL / SERVICE] in order to [REASON]. After using this tool/service, the author(s) reviewed and edited the content as needed and take(s) full responsibility for the content of the published article.
The declaration does not apply to the use of basic tools, such as tools used to check grammar, spelling and references. If you have nothing to disclose, you do not need to add a statement.
Please note: to protect authors’ rights and the confidentiality of their research, this journal does not currently allow the use of generative AI or AI-assisted technologies such as ChatGPT or similar services by reviewers or editors in the peer review and manuscript evaluation process. We are actively evaluating compliant AI tools and may revise this policy in the future.
Please read our policy on the use of generative AI and AI-assisted tools in figures, images and artwork. This policy states:
1. We do not permit the use of Generative AI or AI-assisted tools to create or alter images in submitted manuscripts.
2. The only exception is if the use of AI or AI-assisted tools is part of the research design or methods (for example, in the field of biomedical imaging). If this is the case, such use must be described in a reproducible manner in the methods section, including the name of the model or tool, version and extension numbers, and manufacturer.
3. The use of generative AI or AI-assisted tools in the production of artwork such as for graphical abstracts is not permitted. The use of generative AI in the production of cover art may in some cases be allowed, if the author obtains prior permission from the journal editor and publisher, can demonstrate that all necessary rights have been cleared for the use of the relevant material, and ensures that there is correct content attribution.
Complaints Policy
We aim to respond to and resolve all complaints quickly and constructively. The procedures to investigate and resolve complaints, followed by the journal, aim to be fair and balanced for those making complaints and for those being complained about. The complaint can be made by writing an email.
Advertising Policy
We do not publish any advertisements in this journal.
Retraction Policy
The papers published in this journal will be considered for retraction in the publication if:
- They have clear evidence that the findings are unreliable, either as a result of misconduct (e.g., data fabrication) or honest error (e.g., miscalculation or experimental error)
- The findings have previously been published elsewhere without proper cross-referencing, permission, or justification (i.e,. cases of redundant publication)
- It constitutes plagiarism
- It reports unethical research.
Ethical Guidance
Ethical Oversight
According to the Committee on Publication Ethics (COPE), ethical oversight should include but is not limited to, policies on consent to publication, publication on vulnerable populations, ethical conduct of research using animals, ethical conduct of research using human subjects, handling confidential data and ethical business/marketing practices. The Journal is committed to considering appeals concerning our authors' non-observance of ethical principles.
Research Involving Human Subjects
When reporting studies that involve human participants, authors should include a statement that the studies have been approved by the appropriate institutional and/or national research ethics committee and have been performed in accordance with the ethical standards as laid down in the 1975 Declaration of Helsinki (https://www.wma.net/what-we-do/medical-ethics/declaration-of-helsinki/), revised in 2013, and its later amendments or comparable ethical standards.
If doubt exists whether the research was conducted in accordance with the 1975 Helsinki Declaration or comparable standards, the authors must explain the reasons for their approach and demonstrate that the independent ethics committee or institutional review board explicitly approved the doubtful aspects of the study. At a minimum, a statement including the project identification code, date of approval, and name of the ethics committee or institutional review board should be stated in Section ‘Ethical Approval’ of the article.
An example of an ethical statement: "All subjects gave their informed consent for inclusion before participating in the study. The study was conducted in accordance with the Declaration of Helsinki, and the protocol was approved by the Ethics Committee of XXX (Project identification code)."
Use of Animals in Research
The welfare of animals used for research must be respected. When reporting experiments on animals, authors should indicate whether the international, national, and/or institutional guidelines for the care and use of animals have been followed and that the studies have been approved by a research ethics committee at the institution or practice at which the studies were conducted (where such a committee exists).
The Journal endorses the ARRIVE guidelines (https://arriveguidelines.org/arrive-guidelines) for reporting experiments using live animals. Authors and reviewers can use the ARRIVE guidelines as a checklist, which can be found at: https://arriveguidelines.org/resources/author-checklists.
Research Involving Cell Lines
Methods sections for submissions reporting on research with cell lines should state the origin of any cell lines. For established cell lines, the provenance should be stated, and references must also be given to either a published paper or a commercial source. If previously unpublished de novo cell lines were used, including those gifted from another laboratory, details of institutional review board or ethics committee approval must be given, and confirmation of written informed consent must be provided if the line is of human origin.
Example of an ethical statement: "The HCT116 cell line was obtained from XXX. The MLH1+ cell line was provided by XXX, Ltd. The DLD-1 cell line was obtained from Dr. XXX. The DR-GFP and SA-GFP reporter plasmids were obtained from Dr. XXX, and the Rad51K133A expression vector was obtained from Dr. XXX."
Research Involving Plants
Experimental research on plants (either cultivated or wild), including a collection of plant material, must comply with institutional, national, or international guidelines. We recommend that authors comply with the CBD (https://www.cbd.int/convention/) and the CITES (https://cites.org/eng).
For each submitted manuscript supporting genetic information and origin must be provided. For research manuscripts involving rare and non-model plants (other than, e.g., Arabidopsis thaliana, Nicotiana benthamiana, Oriza sativa, or many other typical model plants), voucher specimens must be deposited in an accessible herbarium or museum. Vouchers may be requested for review by future investigators to verify the identity of the material used in the study (especially if taxonomic rearrangements occur in the future). They should include details of the populations sampled on the site of collection (GPS coordinates), date of collection, and document the part(s) used in the study where appropriate. For rare, threatened, or endangered species, this can be waived, but it is necessary for the author to describe this in the cover letter.
Example of an ethical statement: "Torenia fournieri plants were used in this study. White-flowered Crown White (CrW) and violet-flowered Crown Violet (CrV) cultivars selected from ‘Crown Mix’ (XXX Company, City, Country) were kindly provided by Dr. XXX (XXX Institute, City, Country)."